칼텍, 백팩 드론을 장착한 휴머노이드 로봇 공개
페이지 정보
본문
(퍼플렉시티가 정리한 기사)
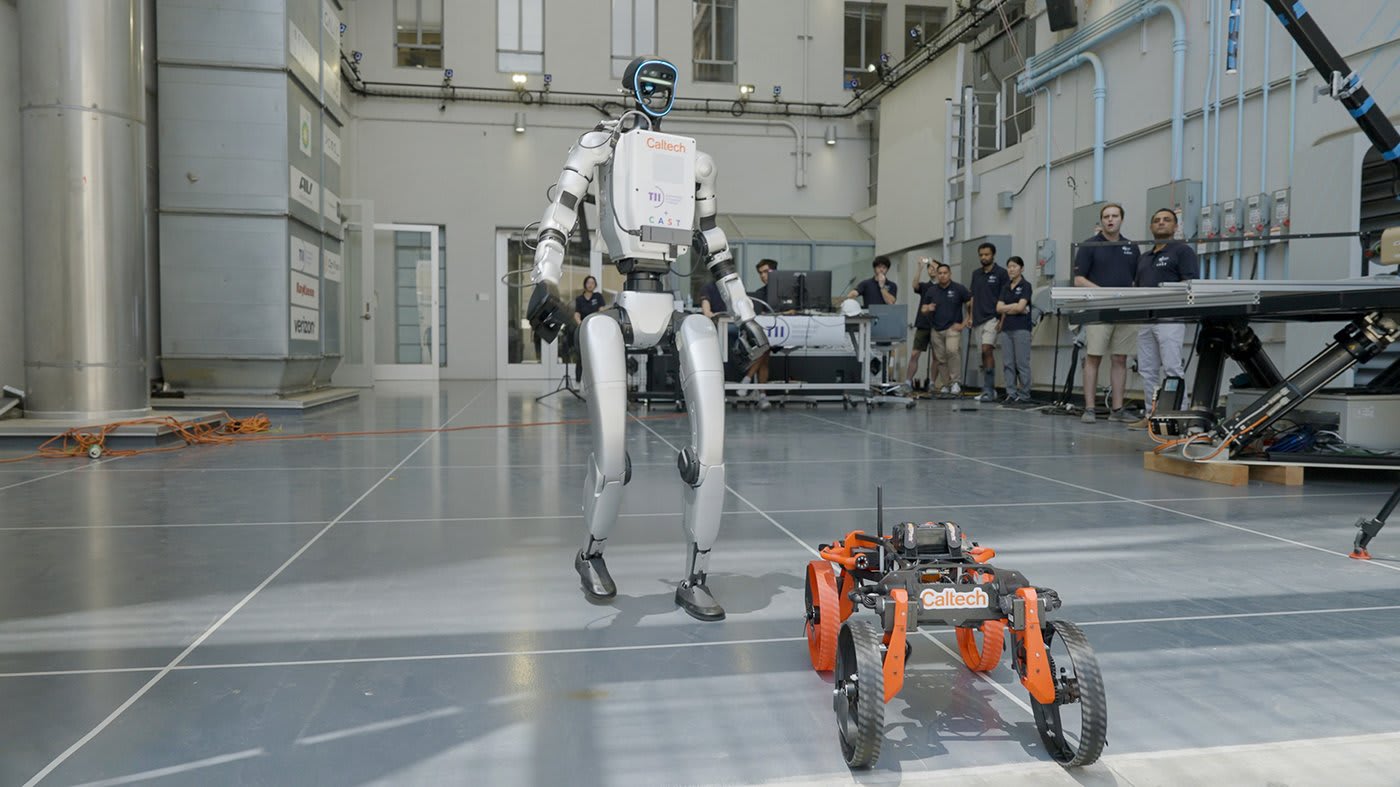
캘리포니아 공과대학교와 아부다비의 기술혁신연구소(TII) 연구진이 인간형 로봇의 등에서 발사되어 비행 모드와 주행 모드 사이를 원활하게 전환할 수 있는 변형 드론을 통합한 세계 최초의 다중 로봇 시스템 X1을 소개했습니다.
10월 14일 공개된 이 획기적인 시스템은 Caltech의 자율 시스템 및 기술 센터(CAST)와 TII 간 3년간의 협력 결과물입니다. 캠퍼스 시연에서 연구팀은 X1이 공중 구성 요소를 배치하여 장애물을 통과하고 기존의 단일 모드 로봇보다 더 빠르게 목적지에 도달함으로써 비상 상황에 어떻게 대응할 수 있는지 선보였습니다.
혁신적인 다중 모달 접근법
X1 시스템은 Caltech의 M4 멀티모달 로봇을 백팩처럼 운반하는 개조된 기성 Unitree G1 휴머노이드 로봇을 사용합니다. 시연에서 휴머노이드는 Gates-Thomas Laboratory에서 Sherman Fairchild Library를 거쳐 높은 배치 지점까지 걸어갔으며, 그곳에서 앞으로 몸을 숙여 M4 드론을 발사했습니다.
"현재 로봇은 날 수 있고, 운전할 수 있으며, 걸을 수 있습니다. 이것들은 모두 특정 시나리오에서 훌륭합니다"라고 CAST의 디렉터이자 Caltech의 기계 및 토목공학 Bren 교수인 Aaron Ames는 말했습니다. "하지만 어떻게 이러한 다양한 이동 방식들을 하나의 패키지로 결합하여, 각각의 단점을 완화하면서 이 모든 것의 이점을 최대한 활용할 수 있을까요?"
M4 구성 요소는 착륙하여 주행 모드로 변환한 다음, Caltech의 Turtle Pond를 만났을 때 드론 구성으로 다시 전환하고, 장애물을 넘어 날아가 Caltech Hall 근처의 모의 비상 현장에 도달함으로써 그 다재다능함을 보여주었습니다.
고급 자율 기능
사전 녹화된 인간 동작 데이터에 의존하는 기존의 휴머노이드 로봇과 달리, X1은 물리 기반 수학 모델과 머신러닝을 결합하여 자율적인 동작을 생성합니다. "로봇은 물리 법칙이 지시하는 대로 걷는 법을 학습합니다"라고 Ames는 설명했습니다. "따라서 X1은 걸을 수 있고, 다양한 지형에서 걸을 수 있으며, 계단을 오르내릴 수 있고, 중요한 점은 등에 M4와 같은 것을 메고 걸을 수 있습니다".
이번 협력에는 2025년 7월 TII 엔지니어들의 Caltech 방문 중에 개발된 TII의 Saluki 보안 비행 제어 기술이 통합되었습니다. 향후 개발 계획에는 실시간 환경 적응을 위한 고급 센서, 모델 기반 알고리즘, 머신러닝 기반 자율성 통합이 포함됩니다.
이번 발표는 TII가 NVIDIA와 협력하여 중동 최초의 AI 및 로보틱스 공동 연구소를 출범시킨 9월 파트너십을 포함하여 로보틱스 이니셔티브를 확대하는 가운데 이루어졌습니다. X1 시스템은 신속한 배치와 다중 지형 탐색이 초동 대응자 및 재난 구조 작업에 매우 중요할 수 있는 비상 대응 분야에서 조정된 로봇 팀의 잠재력을 보여줍니다.